About the paper
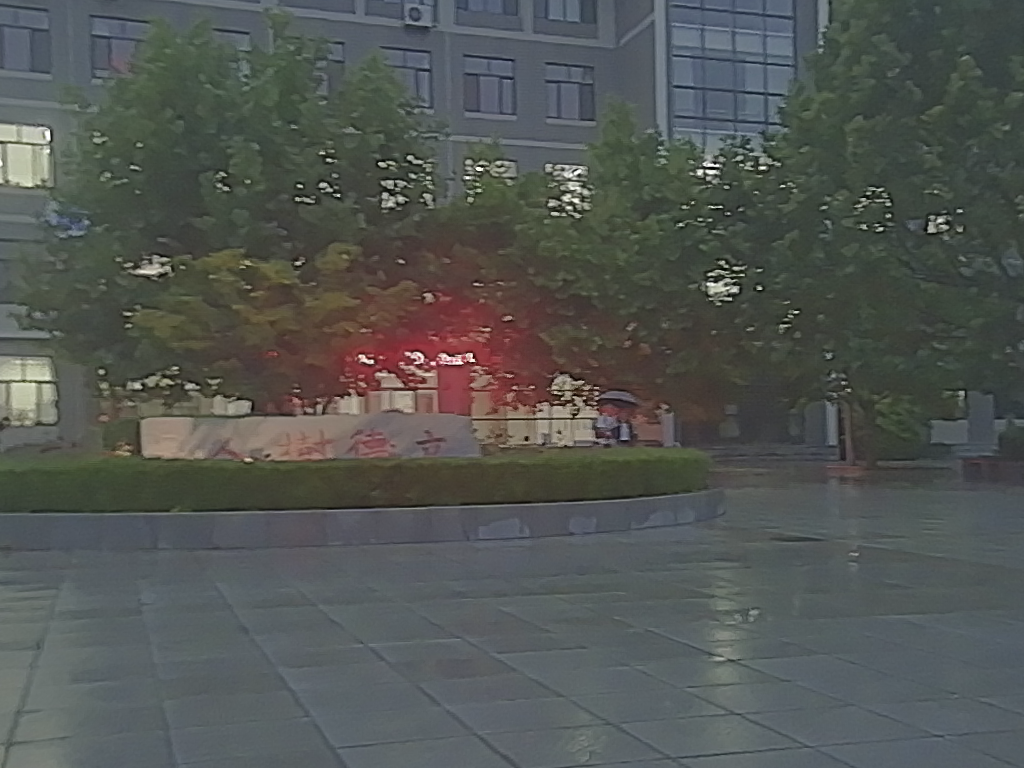
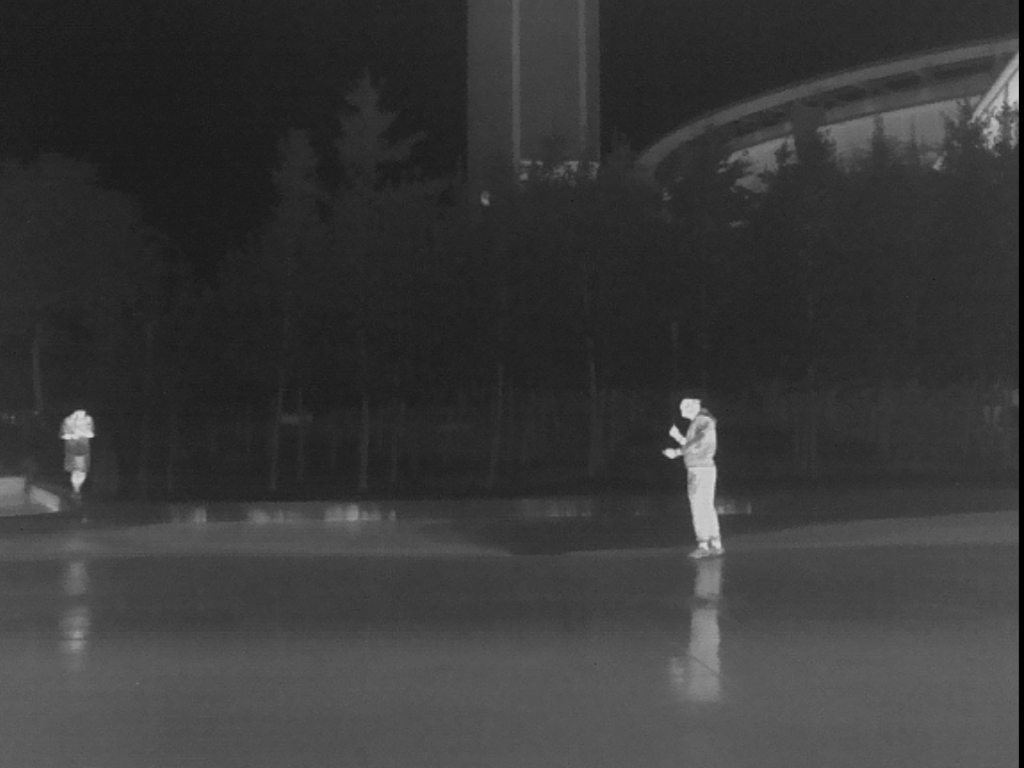
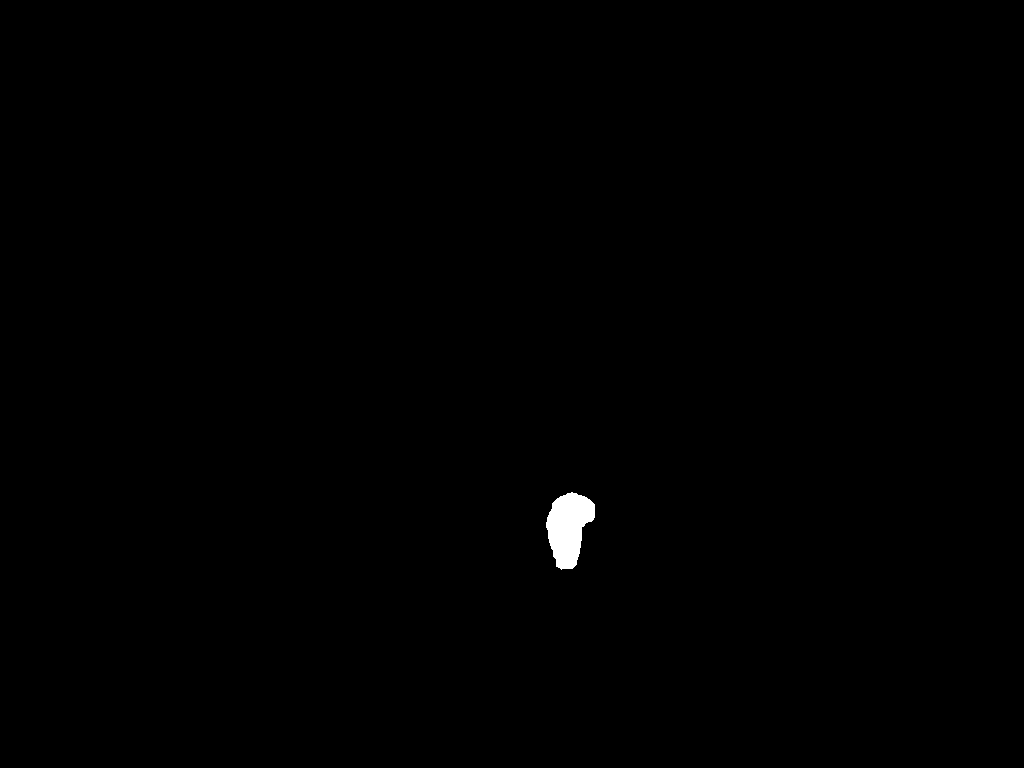
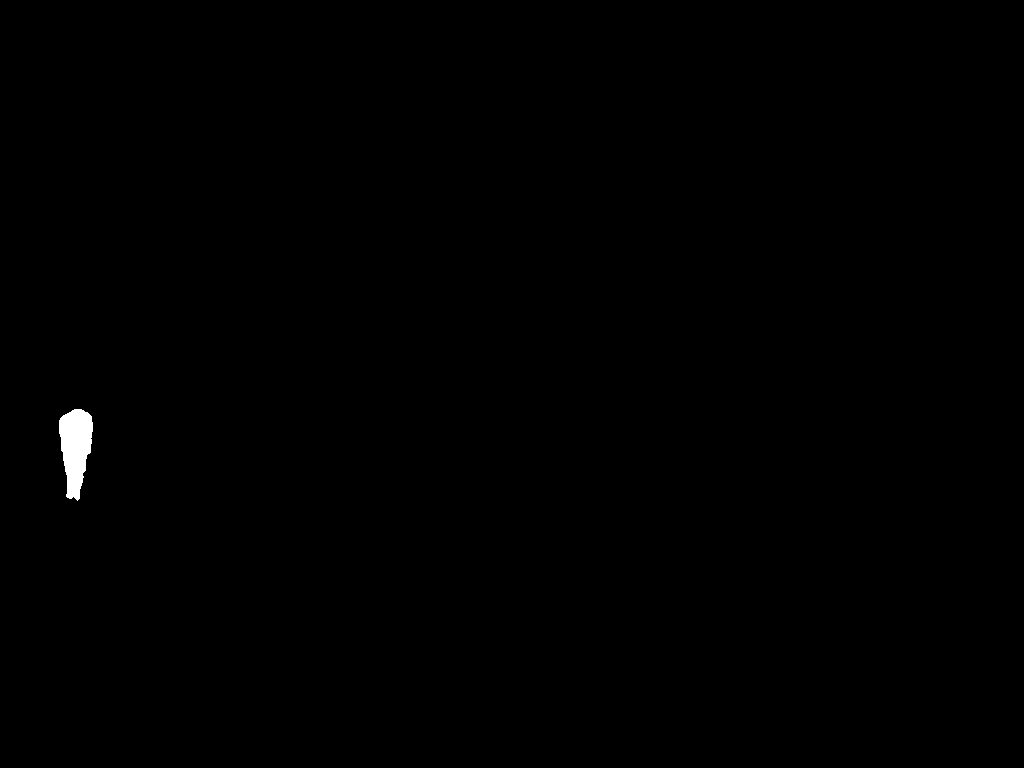
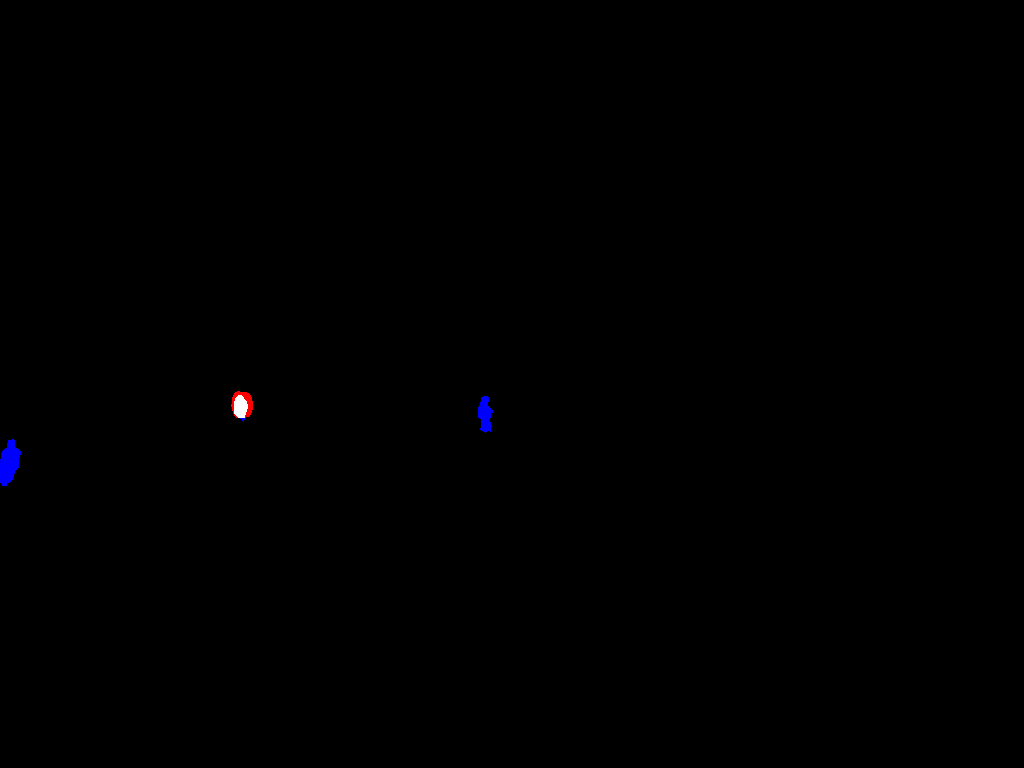
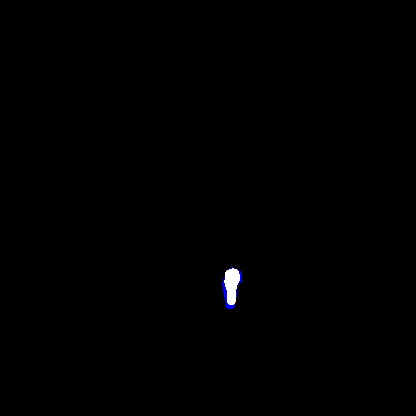
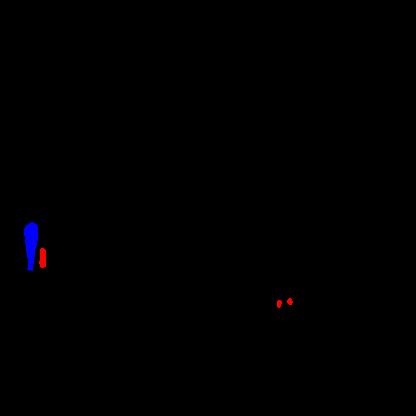
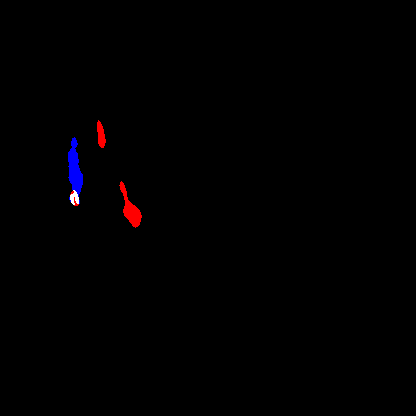
Pedestrian detection is fundamental to autonomous driving, robotics, and surveillance. Despite progress in deep learning, reliable identification remains challenging due to occlusions, cluttered backgrounds, and degraded visibility. While multispectral detection—combining visible and thermal sensors—mitigates poor visibility, the challenge of camouflaged pedestrians remains largely unexplored. Existing Camouflaged Object Detection (COD) benchmarks focus on biological species, leaving a gap in safety-critical human detection where targets blend into their surroundings. To address this, we introduce Camo-M3FD (derived from the M3FD* dataset), a novel benchmark for cross-spectral camouflaged pedestrian detection, consisting of registered visible-thermal image pairs. The dataset is curated using quantitative metrics to ensure high foreground-background similarity. We provide high-quality pixel-level masks and establish a standardized evaluation framework using state-of-the-art COD models. Our results demonstrate that while thermal signals provide indispensable localization cues, multispectral fusion is essential for refining structural details. Camo-M3FD serves as a foundational resource for developing robust, safety-critical detection systems. The dataset is available on GitHub: https://cod-espol.github.io/Camo-M3FD/.
(*) Liu, J., Fan, X., Huang, Z., Wu, G., Liu, R., Zhong, W., & Luo, Z. (2022). Target-aware dual adversarial learning and a multi-scenario multi-modality benchmark to fuse infrared and visible for object detection. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition (pp. 5802-5811).










| Dataset | Source | Year | Scope | Type of images | # images |
|---|---|---|---|---|---|
| Chameleon [29] | - | 2018 | Animal | RGB | 76 |
| CAMO [21, 39] | CVIU | 2019 | Animal & others | RGB | 1,250 |
| COD10K [11, 12] | CVPR | 2020 | Animal & others | RGB | 10,000 |
| NC4K [25] | CVPR | 2021 | Animal & others | RGB | 4,121 |
| Camo-M3FD (Ours) | CVPR | 2026 | Pedestrian | RGB + Thermal | 614 |




























| Technique | Input | Sα ↑ | Fβw ↑ | M ↓ | Eφadp ↑ | Eφmean ↑ | Eφmax ↑ | Fβadp ↑ | Fβmean ↑ | Fβmax ↑ |
|---|---|---|---|---|---|---|---|---|---|---|
| BASNet [28] | Vis | 0.6239 | 0.2902 | 0.0032 | 0.6972 | 0.7183 | 0.8042 | 0.2879 | 0.3057 | 0.3137 |
| Th | 0.7051 | 0.4161 | 0.0028 | 0.7293 | 0.7822 | 0.8078 | 0.3762 | 0.4358 | 0.4571 | |
| SINet-v2 [12] | Vis | 0.6275 | 0.2693 | 0.0037 | 0.6039 | 0.7080 | 0.7227 | 0.2244 | 0.2872 | 0.3033 |
| Th | 0.6927 | 0.4072 | 0.0034 | 0.6450 | 0.7593 | 0.7949 | 0.3428 | 0.4244 | 0.4424 | |
| BGNet [4] | Vis | 0.6745 | 0.3922 | 0.0500 | 0.7594 | 0.7687 | 0.8142 | 0.3576 | 0.4124 | 0.4255 |
| Th | 0.7196 | 0.4699 | 0.0106 | 0.7664 | 0.8306 | 0.8539 | 0.4315 | 0.4865 | 0.4963 | |
| C2F-Net [3] | Vis | 0.5137 | 0.0432 | 0.0811 | 0.4804 | 0.6079 | 0.7333 | 0.1433 | 0.2155 | 0.2554 |
| Th | 0.5244 | 0.0522 | 0.0663 | 0.5122 | 0.6432 | 0.7656 | 0.2064 | 0.2882 | 0.3437 | |
| OCENet [23] | Vis | 0.5994 | 0.2357 | 0.0037 | 0.6680 | 0.7975 | 0.8201 | 0.2240 | 0.2546 | 0.2632 |
| Th | 0.7277 | 0.4884 | 0.0037 | 0.7122 | 0.8152 | 0.8666 | 0.4253 | 0.4998 | 0.5403 | |
| EAMNet [30] | Vis | 0.5227 | 0.0494 | 0.0160 | 0.4048 | 0.6141 | 0.8109 | 0.0998 | 0.1752 | 0.2352 |
| Th | 0.5047 | 0.0333 | 0.0506 | 0.4946 | 0.6458 | 0.8091 | 0.1836 | 0.2622 | 0.3799 | |
| DGNet [19] | Vis | 0.6438 | 0.3109 | 0.0039 | 0.6720 | 0.7598 | 0.7739 | 0.2759 | 0.3235 | 0.3377 |
| Th | 0.6898 | 0.4073 | 0.0052 | 0.6765 | 0.7928 | 0.8227 | 0.3586 | 0.4244 | 0.4403 | |
| HitNet [17] | Vis | 0.5659 | 0.1593 | 0.0030 | 0.7333 | 0.5685 | 0.7353 | 0.1815 | 0.1721 | 0.1809 |
| Th | 0.6682 | 0.3622 | 0.0029 | 0.7694 | 0.7466 | 0.7778 | 0.3910 | 0.3800 | 0.3919 | |
| PCNet [40] | Vis | 0.6512 | 0.3227 | 0.0034 | 0.5048 | 0.7639 | 0.8069 | 0.1688 | 0.3464 | 0.3552 |
| Th | 0.7034 | 0.4260 | 0.0030 | 0.6187 | 0.8280 | 0.8428 | 0.2674 | 0.4504 | 0.4572 | |
| CTF-Net [41] | Vis | 0.5077 | 0.0525 | 0.0755 | 0.4201 | 0.5912 | 0.7296 | 0.1322 | 0.2449 | 0.3146 |
| Th | 0.6532 | 0.2955 | 0.0116 | 0.4178 | 0.7515 | 0.8073 | 0.1409 | 0.4310 | 0.4794 | |
| AVNet [33] | Vis | 0.6669 | 0.4035 | 0.0029 | 0.8294 | 0.8164 | 0.8287 | 0.3923 | 0.3985 | 0.4068 |
| Th | 0.7289 | 0.5066 | 0.0026 | 0.7989 | 0.8075 | 0.8242 | 0.4831 | 0.4926 | 0.5113 | |
| Vis+Th | 0.7318 | 0.5301 | 0.0030 | 0.8167 | 0.8287 | 0.8617 | 0.5051 | 0.5139 | 0.5362 |











Paper
BibTeX
If you use the Camo-M3FD dataset, please cite the following paper,
@inproceedings{velesaca2026camo-m3fd,
title={Camo-M3FD: A New Benchmark Dataset for Cross-Spectral Camouflaged Pedestrian Detection},
author={Velesaca, Heny O and Mero, Andrea and Castillo, Guillermo and Sappa, Angel},
booktitle={Proceedings of the IEEE/CVF conference on computer vision and pattern recognition workshops},
pages={1--8},
year={2026}
}